
Tesla has published a new patent application that explains how its cars could read the road without using extra sensors like lidar or radar. The filing gives a close look at how the company wants to build a 3D driving view entirely from software and camera images. The document was published as US 2026/0127891 A1 on May 7, 2026.
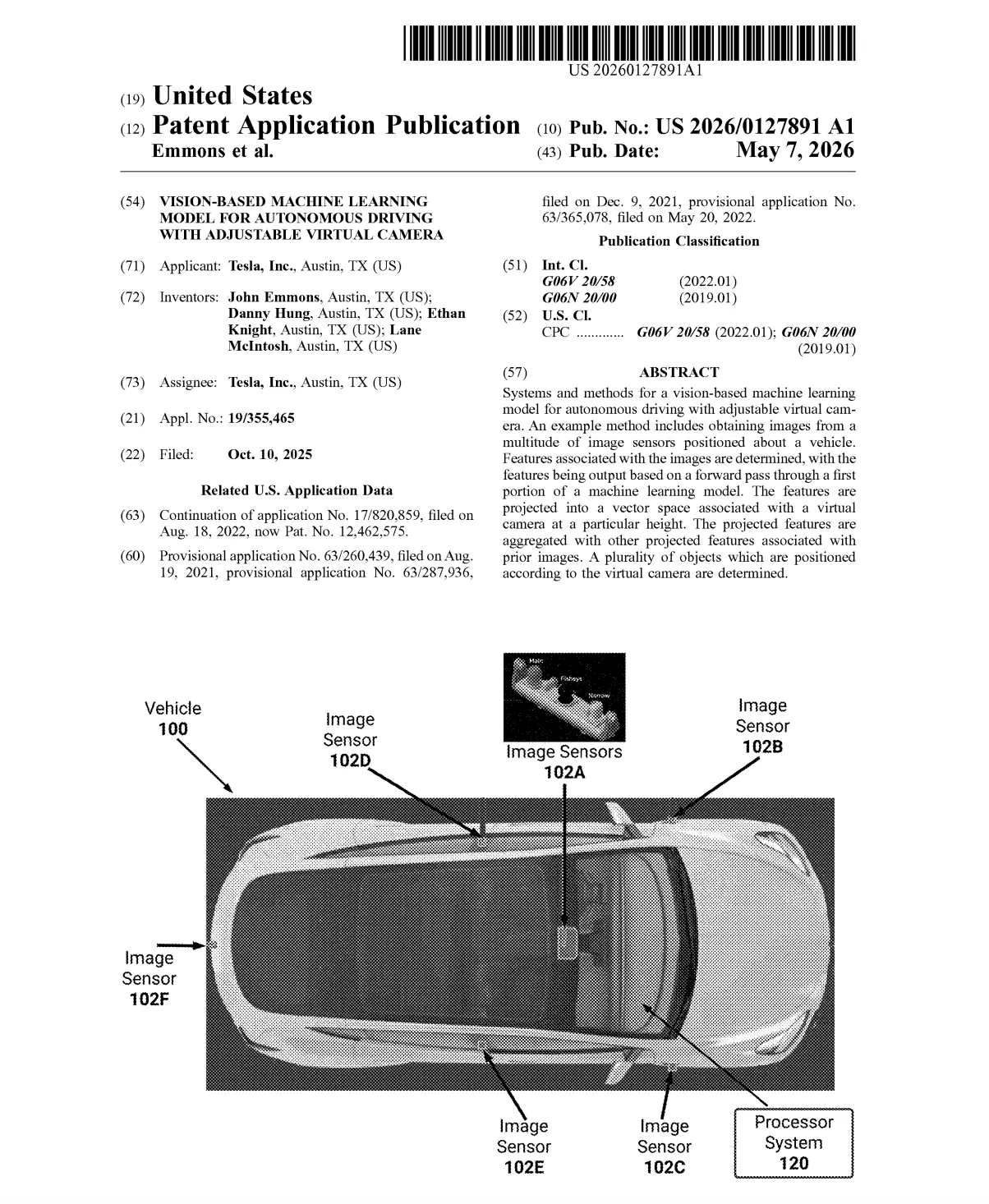
Tesla, Inc. is listed as the applicant and assignee on the filing, and the named inventors are John Emmons, Danny Hung, Ethan Knight, and Lane McIntosh.
How the system reads the road
The system starts by taking raw video from all eight cameras at the exact same time. The computer pulls out vital features from those pictures like object edges, shapes, and movement patterns. Then it projects all of this information into a shared 3D vector space. This vector space works like a digital sandbox where every object gets an exact mathematical coordinate. And putting everything into this shared digital space completely eliminates the blind spots between the physical cameras on the car.
The patent explains this method is very different from older systems. Older software usually finds a piece of an object in one camera and tries to stitch it together with a second camera view later. Instead, Tesla fuses the camera data early in the process and lets the software detect objects from the combined view. The filing notes this approach reduces the need for radar and lidar hardware.
Two separate views for traffic
Tesla splits the work into two different processing paths. One path watches for vulnerable road users like pedestrians, cyclists, and people with strollers. For this branch, the system places the virtual camera at eye level, around 1 meter to 2 meters high. The patent explains that a lower angle makes it easier to read human posture and body movement.
The other path watches large vehicles like cars, trucks, and buses. For this branch, the system places the virtual camera high above the car, from 13 meters to 30 meters in the air. That high periscope view helps the computer look over large objects and track traffic from a distance.
Fixed roads and moving objects
Tesla handles moving objects and fixed road markings differently. The patent says a straight top-down view is very useful for static things like crosswalks, painted lane lines, and intersections. But that flat view distorts moving targets, so the system uses the virtual cameras for dynamic actors like pedestrians and trucks.
The patent lists several different network structures the system uses to process the video. These include convolutional neural networks, residual blocks, and transformers. The final output gives the car exact details about object locations, speed, acceleration, and whether a vehicle ahead has an open door or is stopped for traffic.
The filing explains how the car understands time and speed. The system groups video frames in short bursts covering 3 seconds to 15 seconds. That short history lets the car track a pedestrian even if they step behind a tree for a moment. The computer also tracks pedestrian speed relative to the ground, while it tracks vehicle speed relative to the moving Tesla.
The patent also details several ways the software improves image quality. It captures multiple exposures at different shutter speeds to handle bright sunlight and dark shadows. The system then blends those pictures to avoid washed-out bright spots and crushed shadows. The filing says Gaussian blur can be added to sharp road edges to make them easier for the software to read. The software can also crop out reflections from the windshield glare shield and adjust for slight differences in where cameras are mounted on each car.
You may also like to read:
- Tesla gets patent for 2D-to-3D labeling system to speed up Full Self-Driving »
- Tesla files new patent to remove cabin heat and save battery life »
- Tesla files patent for new interior clip to stop cabin rattles »
We’ve launched an official Tesla Owners Online Forum. Join early and claim your "Founding Fuel" badge.
